
Touch
The tactile sense, or touch, is the first of our senses to develop and arguably the most complex. The first complexity is that this sense is a major part of what is often known as the somatosensory system, a complex group of sensory systems that detect and interpret changes (contact, movement, pressure, pain and stretch) of the surfaces of all aspects of our external and internal body. We often just think about our skin and touching things externally. However, there is infinitely more to it than this. We will come to other complexities later.
Somatic sensing
Somatic sensing is involved in tactile touch, oral texture (and therefore taste), the movement of our body parts, body position, and all aspects of interoception. Examples include:
Tactile touch: feeling objects or other people against our skin
Oral texture: feeling the graininess of food in our mouth (Gustatory)
Kinaesthetic: feeling the stretch in our muscles when we try to touch our toes (proprioceptive)
Pressure: feeling resistance against our fingers when trying to push a button (Proprioceptive)
Internal sensations: feeling a sensation of stretching to the stomach when we are full, or relaxing of the jaw muscles as a stress is relieved (interoceptive).
Neurobiology of somatic sensing
The somatosensory system is spread through all major parts of the body. It consists both of sensory receptors and afferent neurons in the periphery (skin, muscle and organs for example), and deeper neurons within the central nervous system.
The information they send to the central nervous system is generally divided into four categories: cutaneous (skin), proprioceptive (body position), kinaesthetic/vestibular (body movement), and nociception (pain, discomfort).
We are going to discuss vestibular, proprioceptive and interoceptive senses in following sections, so whilst they may be mentioned here, they will not be directly covered. Equally, we will not cover pain in any huge detail because it is an enormous topic. It makes sense to cover the other elements of Somatosensory aspects of the senses in their respective modalities, due to the fact that that part of those senses, is only a contributing factor, and not the only, or even main “detector” for that modality.
Emotions, connection and hormones
The second complexity is that there is another aspect entirely of touch that has, until more recently, been overlooked in research. It is gaining more attention following a wealth of research into better outcomes for premature babies; human social touch, or touch for the purposes of pleasure, connection, and emotional response is essential to what we do, and to humans. We will cover this in more detail further into the section. This is called affective touch.
The functions of touch
Protective touch
Protective touch, is also known as light touch, because it responds to anything that lightly brushes the skin, such as an animal brushing your leg. The kind of response we can expect from our protective system of touch is best imagined when we think of unexpectedly walking into a spider’s web. Your body will have an automatic protective response and move you away. It is also this part of our touch sense that will move our hand if we touch something hot or touch something that hurts, like a thorn. The light touch pathway responds immediately but the information from it is not very specific. It is thought that children and adults with tactile sensitivity pay more attention to messages from this pathway than children and adults without sensory issues.
Discriminative touch
Discriminative touch is also called ‘fine’ touch. This part of our touch system provides detailed and specific information about what we are touching or where we are being touched. If you consider the spider web example, the light touch system would know something unpleasant is touching your arm and make you move. The discriminative touch pathway will tell the brain that what touched the skin felt sticky. From your previous experiences your brain could figure out it was likely a spider web. Then, when you feel your arm to find exactly where the spider web is and take it off, that’s also your discriminative touch pathway working. This pathway is important for accurate and precise fine motor skills, and thought to be important for the development of motor planning.
Touch pressure or deep touch pressure
Touch pressure is, as you might imagine, firmer touch, or a squeeze. It is sometimes called deep touch pressure. It works alongside the discriminative touch pathway. Your discriminative touch pathway tells you where the person is touching you but you also feel how hard they are squeezing. That sensation of how soft or hard they are squeezing is called touch pressure. Example would be when you tighten your shoes, you know if they are too tight or loose by the amount of pressure they are putting on your feet if you are under a heavy blanket, you can feel the pressure it is putting on your skin, or if someone is hugging you, how strong that hug is.
Pain and discomfort
Pain sensations are part of interoception. However, in the pain system, touch plays an important role in sensing the location and intensity of pain, essential information, and affective touch, described below plays its part too in stimulating the negative emotional aspect of pain and discomfort.
In summary, the tactile sense:
- Serves as a protection mechanism
- Allow us to determine our surroundings
- Allow us to gain information to manipulate objects
- Allows us to judge pressure on our body
- Determines the location and severity of pain
- Provides physical relief when experiencing discomfort or pain (rubbing a sore muscle)
- Allows meaningful connection between human beings through affective touch, see below.
Tactile regulation
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Tactile hyper-sensitivity
People who experience tactile input more intensely or who have a low need for tactile input, avoid stimulation and may:
- Avoid being picked up and carried
- Stand further away from people than is natural
- Have strong preferences in clothing
- Hate seams and labels in clothing
- Avoid touching certain surfaces or objects (won’t on a carpet, or touch clay)
- Finds grooming stressful
- Be a picky eater
- “over-react” to minor scrapes
- Be excessively ticklish
- Hate the rain
- Wash their hands excessively or hate washing hands.
This is far from an exhaustive list, and simply represents some things that can be seen.
Tactile hypo-sensitivity
People who experience tactile input less intensely may:
- Not notice minor injuries until pointed out
- Pick up hot food without a reaction
- Not notice having mud, food etc on their hands and face
- Not notice their clothes are too tight, or twisted
- Choose tight fitting clothes for sensory input
- Display tactile sensory seeking behaviours as described below.
Tactile sensory seeking
People who have a high need for tactile input, crave touch stimulation, such as:
- Fiddling with and twirling hair, clothes, objects, materials
- Stroking materials in hands or particularly on their face
- Rubbing their heads, hands together, or twisting fingers
- Body-focused repetitive behaviours: pulling out hair, picking skin, scratching, nail biting.
Neurobiology of the tactile sense
Skin
Sensory receptors
There are three main groups of receptors in our skin:
- mechanoreceptors, responding to mechanical stimuli, such as stroking, stretching, or vibration of the skin;
- thermoreceptors, responding to cold or hot temperatures;
- chemoreceptors, responding to certain types of chemicals either applied externally or released within the skin (such as histamine from an inflammation).
There are specific receptors for detecting injury, which convert to the experience of pain, called nociceptors, but these are subtypes of either chemoreceptors or mechanoreceptors.
Mechanoreceptors in the skin
The skin contains four types of mechanoreceptors, each responding to different stimuli:
Merkel cell nerve endings are found in the basal epidermis and hair follicles. They react to low vibrations and deep static touch such as shapes and edges. Due to having a small receptive field (extremely detailed data), they are used in areas like fingertips the most; they are not covered (shelled) and thus respond to pressures over long periods.
Tactile corpuscles react to moderate vibration and light touch. They are located in the dermal papillae; due to their reactivity, they are primarily located in fingertips and lips. They respond in quick action potentials, unlike Merkel nerve endings. They are responsible for the ability to read Braille and feel gentle stimuli.
Pacinian corpuscles determine gross touch and distinguish rough and soft substances. They react in quick action potentials. They are the most sensitive to vibrations and have large receptor fields. Pacinian corpuscles react only to sudden stimuli so pressures like clothes that are always compressing their shape are quickly ignored. They have also been implicated in detecting the location of touch sensations on handheld tools.
Bulbouse corpuscles react slowly and respond to sustained skin stretch. They are responsible for the feeling of object slippage and play a major role in what is often called kinesthetic feedback and control of finger position and movement. All of these receptors are activated upon pressures that squish their shape causing an action potential.
Tactile sense and the brain
The somatosensory cortex encodes incoming sensory information from receptors all over the body. The somatosensory cortex is part of the forebrain, in the parietal lobe, and is divided into two functional parts known as the primary somatosensory area (S1) and the secondary somatosensory area (S2).
- S1 occupies the postcentral gyrus on the lateral surface and the posterior part of the paracentral gyrus on the medial surface of the cerebral hemisphere.
- S2 is present in the superior limb of the posterior part of the lateral fissure (a fissure in the cerebral hemispheres that separates the frontal and parietal lobes from the temporal lobe).
Representation of the body
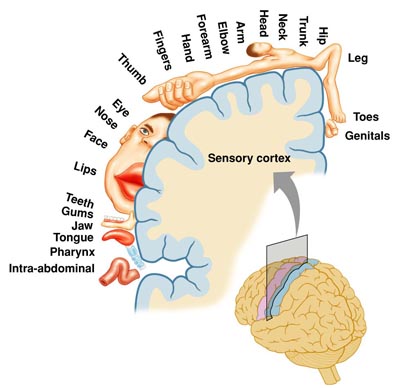
As the somatosensory areas receive sensations from the entire body, the representation of all body parts is present. However, the proportion of representation does not correlate with the body part’s size, but its’ sensitivity. This picture below provides a visual representation of how the body’s sensitivity is proportionally represented in the brain.
“The part of your brain that processes touch information has a map of your body surface. But this map is very highly distorted,” Linden says.
“It over-represents areas that have lots of fine touch receptors (like the face, the lips, the tongue, and the fingers) and under-represents areas that don’t have many receptors (like the small of your back, your chest, and your thighs).”
Representation in primary area (S1)
In the primary somatosensory cortex, the contralateral half of the body is represented as an inverted homunculus. The pharyngeal region, tongue, and lips are represented in the most inferior part; followed by face, fingers, hands, arms, trunk, and thigh.
The leg and foot areas are represented in the posterior part of paracentral lobule, present on the medial surface of cerebral hemisphere. The anal and genital regions are present here.
The proportion of the cortex representation for a particular part of the body depends on its functional importance rather than its size. In fact, the area occupied by a particular body part is proportional to the number of sensory receptors present in it.
Representation in secondary area (S2)
The secondary cortex is much smaller and less important than the primary somatosensory cortex. Here, the body is bilaterally represented with the contralateral side dominant. The leg area is present most posterior, and the face area lies most anterior.



